项目研究和实验的目的、内容和要解决的主要问题
Ⅰ、课题研究的目的
全球化石能源的逐渐匮乏,自然环境的不断恶化越来越受到人们的关注。而对其影响最大的就是汽车产业,传统的车辆对石油的巨大依赖,排放也对大气造成污染,为此,发展低油耗,低排放的混合动力汽车刻不容缓。混合电动汽车兼具内燃机汽车和纯电动汽车的优点,现有的很多家汽车生产商都积极发展混合动力汽车,也正说明了混合动力汽车将会是不久未来的主流趋势。
目前世界各国研究开发的混合动力电动汽车,根据其驱动系统的配置和组合方式不同可分为3种方式:并联式(Parallel Hybrid)、串联式(Series Hybrid)、混联式(Series-parallel Hybrid)。其中混联式效率较高,可使发动机在大部分转速下工作在高效区,且可实现多种控制策略,能够适应多种不同工况循环。
我们的目的是找到一种合适的机构,使发电机和发动机能够以一种最合适的方式运行以降低油耗和排放。设计制造能满足混联式混合动力电动客车的缩小比例的五杆行星轮系动力耦合传动系统。
Ⅱ、项目内容
设计制造缩小比例的五杆行星轮系动力耦合传动系统要实现的模式:
(1).发动机启停模式 (2).纯电动模式 (3).发动机与电动机联合驱动模式 (4).发动机单独驱动模式 (5).再生制动模式
经过方案的设计与优选,我们确定了耦合传动系统的结构简图如图1.1所示。
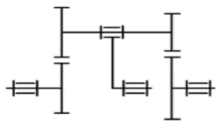
图1.1
经过转化我们得到耦合传动系统的原理图如图1.2所示。

图1.2原理图
该耦合传动系统在不同工况下的原理描述:
2.1 启动工况
(1)过程描述:
点火钥匙打到start挡,MG1立即带动动发动机到1000转左右,并开始点火喷油,直至发动机水温(ECT)和氧传感器达到工作状态。同时比对预设的SOC值,如果检测到SOC低于其设定的目标值,发动机就会给蓄电池充电,同时也提高了发动机的负荷;否则,发动机停止运转。
(2)工作状态:
蓄电池驱动MG1作电动机,带动太阳轮1正向转动(定义顺时针为正,以下同),行星架同行星轮由一个转动副连接,车不动,太阳轮2不动,行星轮自转不动,MG2不动。因此太阳轮1可以带动行星架,进而带动发动机启动。
(3)能量流动:
发动机起动后,SOC较低时对蓄电池充电;SOC较高时,停止充电,并且关闭发动机。
2.2 起步工况
(1)过程描述:
起步时,视车况及起步要求分两种情况:
1当发动机已热且SOC高时,发动机无需起动而直接由动力蓄电池驱动MG2运行,即纯电动模式运行。
2起步加速度要求较大时,轻踏油门,负荷加大,发动机转速提高,但不会太高,因为此时车速很低,转速过高,MG1就会过速。此时,MG2处于低速高扭矩区,提供大部分起步扭矩。
(2)工作状态:
发动机提供主要的动力,拖动行星架转动,同时带动太阳轮1和太阳轮2。太阳轮1带动MG1为发电机给电池充电,行星轮再将动力传给太阳轮2输出。MG2为电动机,提供起动扭矩。其中,发动机扭矩的70%分配到行星轮上再经太阳轮2传递到车轮,30%分配到太阳轮1上并驱动MG1发电,而大部分的起动扭矩来自MG2。
2.3 加速和爬坡工况
(1)过程描述:
在一定车速节气门开度下,车辆进行加速或爬坡,电控单元会根据已有的控制策略,计算当前实际车况功率需求和蓄电池SOC,如果随着加速踏板的深度加深,发动机提高转速增大负荷,则单独由发动机工作;当发动机单独工作不能满足功率要求时,由动力蓄电池给电机供电,输出辅助功率。
(2)工作状态:
行星架和太阳轮2都作正向转动,MG1作发电机,MG2作电动机。当车速上升,MG2的转速也上升;发动机转速上升到一定值,MG1转速就会下降直至反转到其极限转速。行星齿轮无级变速结构,加速时车速提高,通过MG1转速下降到零并开始反转来使车速继续提高,而发动机的转速可以稳定在高效区,因而实现无极变速(CVT)。
2.4 巡航工况
(1)过程描述:
1正常SOC范围内,车辆低负荷状态,发动机一边驱动车辆,一边驱动MG1发电,给蓄电池充电。
2正常SOC范围内,车辆高负荷状态,发动机一边驱动车辆,一边驱动MG1发电,同时一部分电能用于驱动MG2。
3SOC较高,车辆高负荷状态,发动机一边驱动汽车,一边驱动MG1发电,并把所有的电能用于驱动MG2,以满足功率要求。
4正常SOC范围内,车辆全负荷运行时,蓄电池同时给MG1、 MG2供电,满足峰值功率需求。
(2)工作状态:
此时太阳轮1可能正转也可能反转,根据具体车速确定,行星架和太阳轮2正向转动,MG1作发电机,MG2作电动机,全负荷运行时MG1也作为电动机。
(3)能量流动:
MG1发电经过逆变器转换后给蓄电池充电,同时蓄电池给MG2提供电能,MG2输出功率和发动机分配到太阳轮2的功率一起输出到车轮。
2.5 滑行工况
(1)过程描述:
车速一定,松开油门,即进入了滑行模式。由于存在滚阻和空阻,车速逐渐下降。传统汽车的发动机此时仍然通过传动系与车轮相连,拖着发动机继续运转,即发动机制动(Engine Braking)。此时MG2为发电机并为蓄电池充电,通过MG2产生的拖拽力来模仿发动机制动。
(2)工作状态:
太阳轮2转动,带动MG2作发电机,行星架正向转动或静止,太阳轮1反向转动,MG1也发电。高速滑行时,如果发动机停转,行星架静止将会导致MG1过速,所以将MG1设计成发电机给蓄电池充电,并使行星架正向转动。
(3)能量流动:
1高车速时,为了MG1不过速,发动机需要正向运转,MG2模拟发动机制动发电给电池充电,MG1反转发电给电池充电。
2低车速时,MG1不会过速,发动机可以停转,MG2模拟发动机制动发电给电池充电,MG1也可以充电。
2.6 制动工况
制动工况与滑行工况类似,不同的是滑行时仅由电动机和发动机提供制动力,而在制动工况下,为了达到理想制动力曲线,需要前后轮的液压系统提供额外的制动力补足仅由电动机和发动机产生的制动力。理想制动力曲线如图1.3所示。
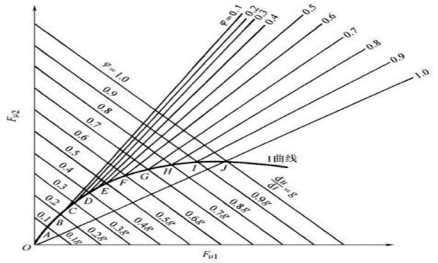
图1.3理想制动力曲线
2.7 低速纯电动工况
(1)过程描述:
车速较低且SOC较高时,发动机无需起动,动力蓄电池提供能量,由电机驱动车辆运行。
(2)工作模式:
太阳轮1反转,行星架不动,太阳轮2正向转动。MG1反转,MG2为电动机驱动车辆。
2.8 倒车工况
(1)过程描述:
倒车时关闭发动机,采用纯电动模式。
(2)工作模式:
太阳轮1正向转动,行星架不动,太阳轮2反向转动。MG1自由转动,MG2作电动机。
要完成上述原理的要求,我们需要按如下几个步骤完成:
1.五杆行星轮系齿轮设计
(1)选取行星齿轮减速器的传动类型和传动简图
(2)行星齿轮传动的配齿计算
1.传动比条件2.邻接条件3.同心条件4.安装条件
(3)行星齿轮传动主要参数初算
1.通过齿面接触强度算小齿轮分度圆直径2.按齿根弯曲强度初算齿轮模数
(4)齿面接触强度校核计算
1.齿面接触应力2.许用接触应力3.强度条件4.有关系数和接触疲劳极限
(5)齿根弯曲强度的校核计算
1.齿根应力2.许用齿根应力3.强度条件4.有关系数和弯曲疲劳强度5.齿轮计算结果
2.五杆行星轮系轴设计
(1)输入轴上的功率P,转速n和转矩T(2)轴上零件的定位方案(3)各个轴段的直径和长度的确定(4)提高轴的强度的方法(5)轴的结构工艺性
3.制造装配
Ⅲ、要解决的主要问题
(1)让来自不同动力源的动力单独输出驱动HEV,或让多个动力共同输出驱动HEV,使彼此之间不发生干涉,提高传动效率。
(2)设计出最适合本课题的五杆行星轮系类型。
(3)由于是传动系,齿轮和轴等零件的强度和刚度都有一定要求,需要找出具有合适力学性能且经济效率的传动系。
|