2.2 Hoap-2人形机器人

图1.3
如图1.3所示,2013年,Sugiyama S等在纽约斯普林格发表了最新的研究成果,他们开发出了一个写日文的人形机器人Hoap-2[3],它包含了一个使用虚拟触觉接口的指令系统,书写轨迹便是由该指令系统给出。Hoap-2人形机器人的亮点在于它是一款专用于写字的机器人,而不仅限于机械臂上,所以该机器人可以通过整体运动写出比它体型大的字符,拓展了传统写字机器人的应用范围。
3.1国内发展概况
我国机器人领域起步较晚,在机器人技术方面也远远落后于国际先进水平。我国从上世纪八十年代才开始展开对机器人的研究,当时的覆盖面较小,仅有部分高校和科研单位参与研究,发展速度比较缓慢。1985年后,国家将机器人技术列入国家发展计划,特别是在国家第七、八、九个“五年计划”和“863”高新技术发展计划的重点支持下,我国的机器人在近30年取得了不少优秀的科研成果。通过查阅资料发现,在世界工业机器人产业全球前十五位重要专利申请人中,有11位来自日本企业,而我国的专利申请则无一上榜,这表明我国的机器人技术实力较国际顶尖水平还存在很大的差距,同时也说明了我国在机器人技术领域还有很大的发展前景和研究价值。
虽然我国机器人技术的综合水平远落后于国际领先水平,但是在书法机器人这一领域的应用还是有相当多的亮点,这可能是得益于我们几千年的文化积淀。笔者选择了两款国内自主研发的、具有标志意义的书法机器人在下文进行图文介绍。
3.2机器人书法大师

图1.4
2000年,北京航空航天大学的景兴碧教授等开发了我国第一台专门用于中国软笔书法的机器人——“机器人书法大师”。[4]该软笔书法机器人系统是为中国科学技术馆二期工程而研制的展品之一,可自动完成换笔、上纸、润笔、书写、盖章及切纸等动作。软笔书法机器人系统启动后,可以在电脑屏幕上选择机器人书写的内容(该内容必须是机器人书写字库中的文字)。值得一提的是,字库中的每一个文字都可以选择不同的字体,该书法机器人支持楷书、隶书、草书、魏碑等字体。该机器人可根据所选择的书写字数的多少,自动确定字体的大小和版式(横排或竖排) ,以保证书写作品完整、美观。还有一大亮点便是,在连续书写一段时间后,机器人能够自动完成润笔等动作。在书写完成后,机器人会将毛笔放回毛笔架上,然后抓取印章,为所书作品盖章。整个流程完全自动化,无需人介入辅助,完成了人类书写过程中的绝大部分细节。
3.3 Callibot书法机器人
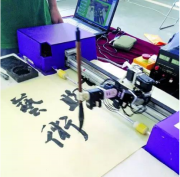
图1.5
2013年12月, 在中国深圳召开的IEEE机器人与仿生学国际会议上,孙远东、徐扬生教授在会议上介绍了他们最近的研究成果——Callibot书法机器人,它是由一个6自由度机器人臂、一条直线轨道和一个送纸器组成[5]。Callibot机器人相较以往书法机器人,大大扩大了手臂的工作空间,很大程度是提高了书写轨迹精度。它采用的是一种演示回放方式,机器人的动作如同人写字一般流畅潇洒。这不仅能增强其观赏效果,还能增添更多的审美趣味。机器人与人类最大的区别在于机器人能够准确地记录演示动作。因此,虽然Callibot没有任何的学习过程,但是它能够写书写出有艺术感的书法字。如图1.5所示 ,Callibot书法机器人能够写出一幅巨大的具有艺术感书法作品。
4.总结
书法机器人着重于对机器人手臂的控制,这样更接近人们对于智能机器人“手”的控制期望。伴随着智能机器人的发展,人们更加期望机器人能够通过不断学习来完成复杂的写字工作,其重点在于学习,能够让机器人通过学习来完成复杂书写动作的控制也成为了近年来的研究热点。书法是一项手眼协调的工作,而机器人手眼协调的发展一直伴随着智能机器人的发展,在尝试对书法机器人写毛笔字改进和提高的过程中,也势必会促进智能机器人的发展和研究。
2.参考文献
[1] 余德泉.国内外工业机器人发展现状与趋势[J].大众用电,2017,32(09):20-21.
[2] Nico Huebel, Elias Mueggler, Markus Waibel, and Raffaello D’Andrea. Towards Robotic Calligraphy[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura, Algarve, Portugal , 2012.
[3] Sugiyama S, Oshita I, Yoshikawa T. Japanese calligraphy using whole body motion of a humanoid robot[M]//Intelligent Technologies and Engineering Systems. Springer New York,2013:345-355
[4] 景兴碧,万仁明,张以都,李秀琴.软笔书法机器人[J].机器人技术与应用,2000(06):21-23.
[5] Yuandong Sun and Yangsheng Xu: A Calligraphy Robot- Callibot: Design, Analysis and ApplicationsInternational [C]/ /Proceedings of the IEEE Conference on Robotics and Biomimetics (ROBIO) Shenzhen, China, December 2013
[6] 宫晓博,王建平.IRB140型工业机器人连续轨迹控制的汉字绘制[J].现代制造工程,2010(02):135-137.
[7]曾兴吉.机器人技术在毛笔书法中的应用研究[J].科技创新与应用,2018(31):152-153.
[8] 杜同春. 写字机器人感知与推理方法研究[D].哈尔滨工程大学,2017.
[9] 俞凯. 计算机书法若干关键技术研究[D].浙江大学,2010.
[10] 曾华琳,黄雨轩,晁飞,周昌乐.书写机器人研究综述[J].智能系统学报,2016,11(01):15-26.
[11] 张学文,陈小安,梁锡昌.写字机器人运动学分析及仿真[J].现代制造工程,2009(10):142-145.
[12] 黄雨轩. 智能机器人自主书写方法的研究[D].厦门大学,2017.
[13] 宁俤修,王中天,许晓飞.软笔书写机器人的研究与设计[J].电子技术,2017,46(07):72-74.
[14] 王光建,梁锡昌.写字机器人的文字矢量化及应用[J].现代制造工程,2004(07):40-42.
[15] 曲波.一种具有环境自适应能力的毛笔机器人[J].微型电脑应用,2004(10):42-44+2-3.
[16] 于建均,门玉森,阮晓钢,徐骢驰.在书写任务中的基于轨迹匹配的模仿学习[J].北京工业大学学报,2016,42(08):1144-1152.
[17] 赖啸.智能制造机器人机构空间轨迹规划和运动仿真设计[J].南方农机,2018,49(17):31+42.
[18] 闫林林,徐方,贾凯,邹风山.Delta机器人运动控制及图形轨迹的动态仿真[J].计算机工程与设计,2015,36(08):2196-2200.
(五) 创新点与项目特色
1.机器自主学习
通过笔画自主生成算法,实现机器人的自主笔画学习并书写汉字,在“看到”新的汉字(字库中没有的)汉字之后,像人类一样通过已经学会的笔画将这个汉字书写出来,并能有自己的风格。
2.模仿学习
汉字的书写过程中涉及了很多重复性的笔画运动,因此可以利用在先前相同笔画运动轨迹中收集得到的数据来优化后面的笔画。
3.智能控制
加入语音识别系统,可以通过人的声音来控制书法机器人的书写内容和字体风格。
4.书法作品的布局与呼应
在真正的书法作品中,书法字的排布是错落有致的,同时前后书法字之间往往有一些呼应关系,如何表达这些呼应关系从而得到更美观的书法字布局将是一项非常有意义的研究。
(六) 技术路线、拟解决的问题及预期成果
主要问题:
1.书写效果单一
就目前的书法机器人而言,基本上都能够自主书写出具有美感的书法字,书写轨迹精度相较初代书法机器人有了极大的提升。但是,现有的各类书法机器人都存在一定的局限性。采用对现有字库进行编程的书法机器人,则只能书写字库中的汉字,且书写效果单一。
2.书写较多时出现问题
当它书写字数较多的作品时,便会出现两个问题:
(1)PC端处理速度太慢,需要很长的时间规划书写轨迹,甚至部分字出错。
(2)作品没有整体艺术感。
3.书法水平及延展应用方面受限
跟随书写机器人需要依靠人的介入辅助,并不能很好地体现机器人自主书写的能力,其书写效果很大程度上取决于书写者的书法水平,笔画难以通过自主学习来进行自我优化。这种模仿式、非完全自主的书法机器人不适用于较重的或大型的机械臂,所以在延展应用方面也更为局限。
(七) 项目研究进度安排
(一)准备阶段
1.2019年3月,熟悉OpenCV软件、课题任务及要求。
2.2019年4月,查阅60篇以上有关delta机器人、书写机器人的中英文文献资料。
3.2019年6月至2019年10月,基于所查阅的相关文献资料,完成文献综述,并让老师指导审阅。
(二)设计阶段
4.2019年10月,熟悉草书的书写方法和要旨。
5.2019年10月至2020年1月,完成草书字库的设计。
6.2020年1月,建立数学模型,研究书写笔画宽度与按笔深度、笔尖停留时间之间的函数关系。
7.2020年2月,完成草书机器人算法的设计以及书写功能的实现。
8.2020年3月,对草书机器人进行测试并完成专利和论文的初稿。
(三)答辩阶段
9.2020年4月,完成专利和论文定稿。
10.2020年5月,制作PPT并准备答辩、结题。
(八) 已有基础
1. 与本项目有关的研究积累和已取得的成绩
1.参加“塞伯睿创业团队”,具备机器人操作经验教训;
2.参加校级实验室组织的全国大学生电子设计竞赛训练,具备软硬件设计能力。
2. 已具备的条件,尚缺少的条件及解决方法
已具备的条件:DELTA机器人及其编程接口
尚缺少的条件:草书书写规律及轨迹算法
解决方法:调研、重新建模分析,归纳总结,提取成为字库,然后按照规律进行字库重建,以期达到目标。
|